联系我们
山东威力重工液压机厂家
电话:18306370979
传真:0632-5863817
邮箱:2335649508@qq.com
地址:山东省滕州市开发区春滕东路999号行业动态
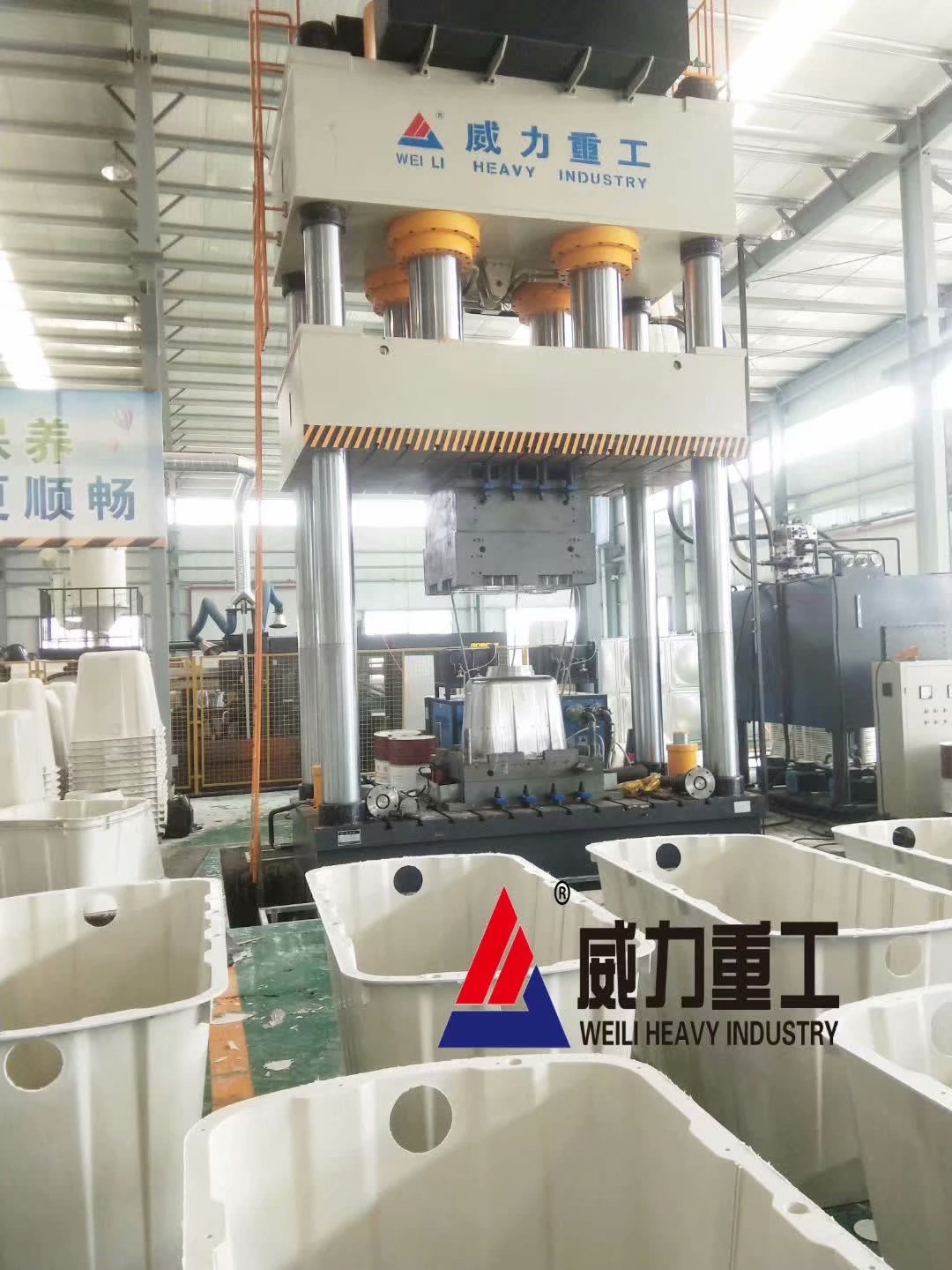
山东威力2600吨灰斗车成型四柱液压机运动控制分析
点击量:153发布时间:2019-03-07 09:52
显然,比例阀控制方法可以驯服野生机器轴。然而,到目前为止提出的系统并不完美。最严重的不足是气缸和负载最终停止的位置的不确定性。如果有超行程,就没有办法支持。因此,几乎所有影响离散方向系统停止点的随机因素都将在此处进行访问山东威力2600吨灰斗车成型四柱液压机比例系统。
与冲击控制成比例的系统,以及全时监控和控制位置的系统称为电液位置伺服机构。它具有有效运动控制的所有理想特性,但由于它是一个真正的反馈控制系统,它引入了自己的一系列挑战。但是,经过适当的设计和调整,该系统可为最苛刻的山东威力2600吨灰斗车成型四柱液压机运动控制应用挑战提供终极解决方案。
位置伺服机构通常被认为是定位系统。然而,当叠加概况的概念时,结果是运动控制 - 机器的总控制。要获得成功,运动控制必须有三个设计内容:
命令运动配置文件
足够的功率来管理所需速度的负载,以及
足够的闭环带宽,以满足精度和稳定性要求。
运动控制曲线对运动控制系统至关重要,代表了数字计算机对运动控制过程的最重要贡献。轮廓是同时控制加速度,速度和位置的手段。轮廓很容易由数字计算机(运动控制器卡或电路板)生成,并在设计时制定,以确定执行器必须根据规定的生产率达到的峰值速度。
在确定这些峰值速度时,我们必须首先收集有关应用程序生产力需求的数据。例如,假设应用程序需要每分钟冲压30包纸盘。我们立即知道循环速率是每秒12个循环。此外,如果我们给出的气缸行程必须是4英寸,并且气缸必须保持延长0.5秒,那么我们知道致动器必须在1.5秒内完全伸展和缩回。我们可以添加一些合理的加速时间,另外还要考虑到山东威力2600吨灰斗车成型四柱液压机气缸自然不希望缩回到它延伸的速度。(是的,这个说法对于阀控气缸来说是正确的。)为了补偿这一点,我们可以从延长时间开始几毫秒,并将其缩短到退回时间。
这个例子使我们得出结论,峰值延伸速度必须大约为10英寸/秒。一旦我们获得最大推力,我们就可以设计一个给定的供应压力,这样就可以完全确定系统中关键部件的尺寸。我们的示例介绍了运动曲线的概念,这是一种在每个循环内的任何时刻以及整个机器寿命期间的每个循环中定义气缸和负载的速度,加速度和位置的方法。
加速度,速度和位置之间的关系 - 在公共时间轴上绘制 - 如图中所示。牛顿通过微积分显示:
速度是加速度的积分
位置是速度的积分
速度是位置的导数,和
加速度是速度的导数。
即使你从未研究过微积分(见下面的方框),这些都是我们物理世界的数学事实。它们对运动控制系统设计者的意义在于,始终指定这三个参数中的任何一个都会自动指定其他两个参数。这是因为它们彼此之间具有不可否认的关系 - 它们都是彼此的积分或衍生物。
即使最终山东威力2600吨灰斗车成型四柱液压机系统仅通过位置反馈关闭回路,这种关系也可以实现加速度,速度和位置的同时控制。它的工作原理如下:位置曲线,即图中底部的曲线图,是山东威力2600吨灰斗车成型四柱液压机动作控制伺服机构的实际命令。位置轮廓的斜率表示每个时刻的输出速度。速度曲线的斜率是加速度曲线,其实际上在位置曲线的曲率中承载。因此,设计者通过控制位置命令轮廓的曲率来控制加速度。

图片仅供参考,详情请咨询18306370979
最终结果是:仅仅将位置命令曲线馈送到运动控制伺服轴,所有三个动态变量都隐含在该曲线中。此外,设计忠实遵循命令配置文件的伺服轴,控制所有三个参数。这是现代运动控制理念的总和和实质。
在设计时,设计方法建议根据生产率和其他运动需求合成整个运动控制曲线,加速度,速度和位置。相反,在调试时,专用运动控制器卡的编程器可能只指定运动必须从位置x到达位置y,最大速度为v,最大加速度为a。数字运动控制器将这些解释为指令,然后即时生成实际的配置文件命令。因此,程序员可能永远不会看到整个配置文件本身。
与冲击控制成比例的系统,以及全时监控和控制位置的系统称为电液位置伺服机构。它具有有效运动控制的所有理想特性,但由于它是一个真正的反馈控制系统,它引入了自己的一系列挑战。但是,经过适当的设计和调整,该系统可为最苛刻的山东威力2600吨灰斗车成型四柱液压机运动控制应用挑战提供终极解决方案。
位置伺服机构通常被认为是定位系统。然而,当叠加概况的概念时,结果是运动控制 - 机器的总控制。要获得成功,运动控制必须有三个设计内容:
命令运动配置文件
足够的功率来管理所需速度的负载,以及
足够的闭环带宽,以满足精度和稳定性要求。
运动控制曲线对运动控制系统至关重要,代表了数字计算机对运动控制过程的最重要贡献。轮廓是同时控制加速度,速度和位置的手段。轮廓很容易由数字计算机(运动控制器卡或电路板)生成,并在设计时制定,以确定执行器必须根据规定的生产率达到的峰值速度。
在确定这些峰值速度时,我们必须首先收集有关应用程序生产力需求的数据。例如,假设应用程序需要每分钟冲压30包纸盘。我们立即知道循环速率是每秒12个循环。此外,如果我们给出的气缸行程必须是4英寸,并且气缸必须保持延长0.5秒,那么我们知道致动器必须在1.5秒内完全伸展和缩回。我们可以添加一些合理的加速时间,另外还要考虑到山东威力2600吨灰斗车成型四柱液压机气缸自然不希望缩回到它延伸的速度。(是的,这个说法对于阀控气缸来说是正确的。)为了补偿这一点,我们可以从延长时间开始几毫秒,并将其缩短到退回时间。
这个例子使我们得出结论,峰值延伸速度必须大约为10英寸/秒。一旦我们获得最大推力,我们就可以设计一个给定的供应压力,这样就可以完全确定系统中关键部件的尺寸。我们的示例介绍了运动曲线的概念,这是一种在每个循环内的任何时刻以及整个机器寿命期间的每个循环中定义气缸和负载的速度,加速度和位置的方法。
位置,速度和加速度是密不可分的,因此控制一个参数会自动控制另外两个参数。
加速度,速度和位置之间的关系 - 在公共时间轴上绘制 - 如图中所示。牛顿通过微积分显示:
速度是加速度的积分
位置是速度的积分
速度是位置的导数,和
加速度是速度的导数。
即使你从未研究过微积分(见下面的方框),这些都是我们物理世界的数学事实。它们对运动控制系统设计者的意义在于,始终指定这三个参数中的任何一个都会自动指定其他两个参数。这是因为它们彼此之间具有不可否认的关系 - 它们都是彼此的积分或衍生物。
即使最终山东威力2600吨灰斗车成型四柱液压机系统仅通过位置反馈关闭回路,这种关系也可以实现加速度,速度和位置的同时控制。它的工作原理如下:位置曲线,即图中底部的曲线图,是山东威力2600吨灰斗车成型四柱液压机动作控制伺服机构的实际命令。位置轮廓的斜率表示每个时刻的输出速度。速度曲线的斜率是加速度曲线,其实际上在位置曲线的曲率中承载。因此,设计者通过控制位置命令轮廓的曲率来控制加速度。
图片仅供参考,详情请咨询18306370979
最终结果是:仅仅将位置命令曲线馈送到运动控制伺服轴,所有三个动态变量都隐含在该曲线中。此外,设计忠实遵循命令配置文件的伺服轴,控制所有三个参数。这是现代运动控制理念的总和和实质。
在设计时,设计方法建议根据生产率和其他运动需求合成整个运动控制曲线,加速度,速度和位置。相反,在调试时,专用运动控制器卡的编程器可能只指定运动必须从位置x到达位置y,最大速度为v,最大加速度为a。数字运动控制器将这些解释为指令,然后即时生成实际的配置文件命令。因此,程序员可能永远不会看到整个配置文件本身。